罗克韦尔(AB)PLC讲解,MicroLogix1400,PID应用


一、平台二、目的1、熟悉PID指令2、掌握PID指令的基本应用三、PID指令介绍三:步骤2、程序说明程序请参见3、其中文件PD110是已建立一个PD类型的数据文件(默认有一个元素,可以通过数据文件的属......
1、熟悉PID指令
2、掌握PID指令的基本应用三、PID指令介绍
三:步骤2、程序说明
程序请参见
3、其中文件PD110是已建立一个PD类型的数据文件(默认有一个元素,可以通过数据文件的属性更改)。所有关于PID的参数都可以在此PD变量中找到,如图1所示。
图1
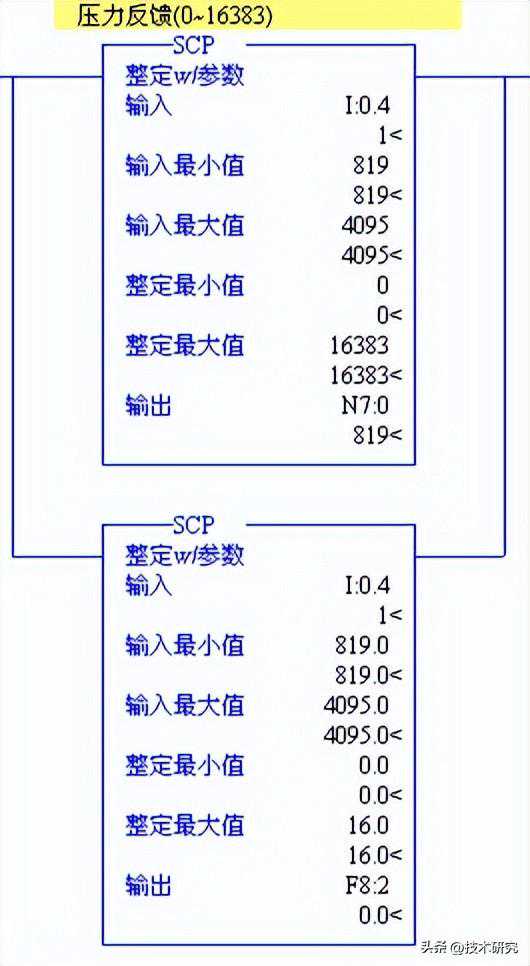
图2
5、把压力设定值标定到(0~16383)作为PID的设定值输入,变量为N7:2,如图3所示。
图3
6、PID参数设置
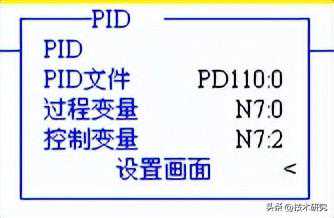
图4
单击图4中,PID指令上的设置画面,可显示一个对话框图5,允许您输入附加参数。这些参数描述如下。
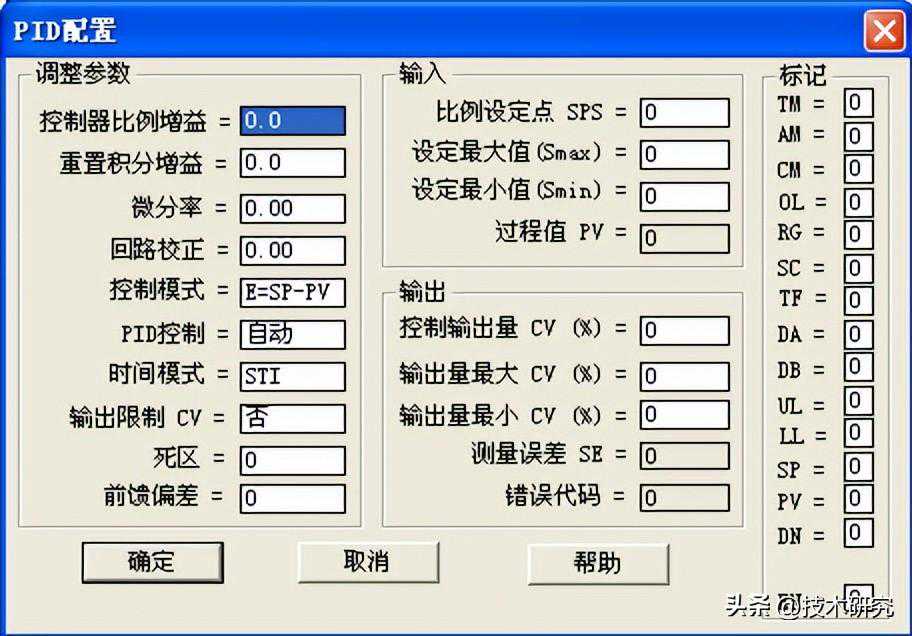
图5
当输入参数时,您可以键入一个值,或双击参数栏,浏览可用的选项。
调整参数:
控制器增益Kc
键入一个值。(对于5/02控制器,有效范围是0.1到25.5。5/03、5/04和
5/05处理器的有效值范围
=0到3276.7。)
这是比例增益。通常,当复位和速率项被设置为零时,将该增益设置为引起输
出振荡所需值的一半。注意:当使用
5/03、5/04和5/05处理器时,RG位必须被设置,以接受超过25.5的值。
积分增益Ti
键入一个代表分钟的值。
这是积分增益。一般将复位时间设置等
(对于5/02控制器,有效范围是0.1到25.5。5/03、5/04和5/05处理器的有效值范围=0到3276.7。)
于上面的增益校准中所测量的自然周期。注意:当使用5/03、5/04和5/05处理器时,RG位必须被设置,以接受
超过25.5的值。
微分率Td
键入一个代表分钟的值。
这是微商项。通常将该值设置为上面积
(对于5/02控制器,有效范围是0.1到2.55。5/03、5/04和5/05处理器的有效值范围=0到3276.7。)
分时间的1/8。
注意:RG(复位和增益范围)位不影响该字。
循环更新
键入一个代表秒的值。(对于5/02控制器,范围是从0.1到25.5。对于5/03、
5/04和5/05控制器,有
效范围是0.01到10.23
这是PID计算之间的时间间隔。输入条目是0.01秒的间隔。通常输入的循环
更新时间比负载的自然周期快5到10
倍(确定方法为:将复位和速率参数设置为零,然后增加增益,直到输出开始
秒。)
振荡)。注意:在STI模式中时,该值必须等于STI时间间隔值S:30。
控制模式
选择E=SP-PV(反作用)或E=PV–SP(正作用)。
当输入PV小于调整点SP时,反向作用导致输出CV增加(例如,加热应用)。当输入PV大于调整点SP时,直接作用导致输出CV增加(例如,冷却应用)。
PID控制
选择Auto(自动)或Manual(手动)。
自动表明PID在控制输出。(字0第1
位清零)手动表明用户在设置输出。(字
0第1位被设置。
时间模式
选择Timed(定时)或
STI。
如果选择了定时模式,PID以在循环更新参数中指定的速率更新其输出。
当使用定时模式时,您的处理器扫描时
间应当至少比循环更新时间快10倍,
以防止定时误差或干扰。
如果选择了STI模式,每次PID被扫描时更新其输出。当您选择了STI时,
PID指令应当被编写在STI中断子程
序中,STI例程的时间间隔应当等于PID循环更新参数的设置值。在字S:30中设置STI周期。
限制输出CV
选择是或否。
选择是,将输出限制为最小值和最大值之间。选择否,不对输出施加限制。
死区DB
键入一个值,从0到缩放
的最大值,或者0-16383
(当不存在缩放时)。
该死区延伸到调整点以上和以下您输入的值。在过程变量PV和调整点SP的零交叉处进入死区。这意味着只有当过程变量PV进入死区之后且通过调整点,死区才有效。
输入:
调整点SP
键入1-16383之间或在有效的缩放范围内的一个值。
过程变量的期望控制点。通过您的梯形图程序将该值输入到控制块中的第3个字(字2)。
最大调整点
键入一个值。(对于5/02
如果设定值是以工程单位读取的,那么
(Smax)
控制器,有效范围从
-16383到+16383。5/03
和5/04控制器的有效范围是-32768到+32767。)
当控制输出为16383时,这便对应设定点的工程单位值。
最小调整点
(Smin)
键入一个值。(对于5/02控制器,范围是从-16383到+16383。对于5/03和
5/04控制器,有效范围是从-32768到+32767。)
如果设定值是以工程单位读取的,那么当控制输出为零时参数对应的是设定点的工程单位值。
过程变量PV
(不可编辑,仅用于显示)
这是过程变量(模拟输入)的标度值。如果不缩放,则该值的范围是0–16383。否则,范围是最小缩放值
(字8)到最大缩放值(字7)。
输出:
控制输出
CV(%)
如果您选择了手动模式,键入0-16383的一个值。
允许您更改输出控制变量的百分比。
最小输出
(CV%)
键入一个值。
如果限制输出CV为是,那么您输入的值是控制变量CV将获得的最小输出百分比。如果CV跌至这个最小值之下,CV将被设置为您所输入的值,并且输出警报下限(LL)位将被设置。
如果限制输出CV为否,则您所输入的值将决定何时设置输出警报下限位。如果CV跌至这个最小值之下,输出警报
下限(LL)位将被设置。
最大输出
(CV%)
键入一个值。
如果限制输出CV为是,那么您输入的值是控制变量CV将获得的最大输出百分比。如果CV超过这个最大值,CV将
被设置为您所输入的值,并且输出警报上限(UL)位将被设置。
如果限制输出CV为否,则您所输入的值将决定何时设置输出警报上限位。如果CV超过这个最大值,输出警报上限
(UL)位将被设置。
测量误差SE
(不可编辑,仅用于显示)
这是控制模式参数所选择的缩放误差。当使用一个5/03或5/04处理器时,标度错误大于32767或小于-32767的
不能被表示。
7、把PID计算结果(0~36383)标定到(0~5000),即对应变频器的频率:0~50Hz),N7:3即为PID计算的最终结果,可以通过通讯的方式传送给变频器以控制泵的转速,从而实时调节系统压力,如图6所示。
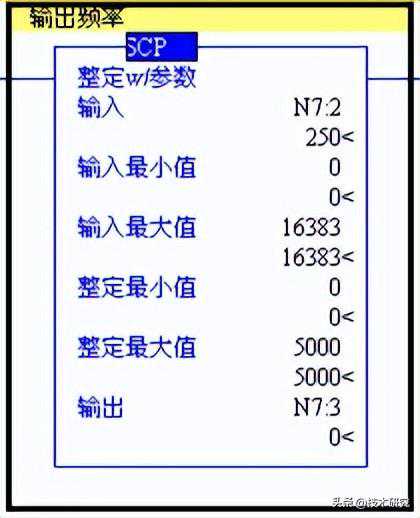
图6

图7

图8

图9
本文链接:https://goko.jsntrg.cn/616640207286.html