罗克韦尔(AB)PLC讲解,运动控制讲解(6)轴的测试和调整


A、连接诊断。B、自动处理过程(自整定过程)。C、动态调整。D、增益调整。E、输出调整。A、偏移量调整。伺服驱动器(伺服放大器)模块7段液晶显示代码与含义。7段液晶显示指示灯状态执行如下操作动态循环(......
A、连接诊断。
B、自动处理过程(自整定过程)。
C、动态调整。
D、增益调整。
E、输出调整。
A、偏移量调整。
伺服驱动器(伺服放大器)模块7段液晶显示代码与含义。
7段液晶显示指示灯
状态
执行如下操作
动态循环(相位0)
驱动器正在寻找一个闭合的SERCOS环网,等待相位1或采取纠正措施,直到到达相位1
检查光纤连接端
显示固定的1(相位1)
驱动器正在寻找活动(激活的)节点,等待相位2,或采取纠正措施,直到到达相位2
检查节点地址
显示固定的2(相位2)
驱动器正在配置(组态)通信的节点,等待相位3,或采取纠正措施,直到到达相位3
针对安装的硬件,检查电机程序和驱动器配置
显示固定的3(相位3)
驱动器正在配置(组态)设备(电机)相关参数,等待相位4,或采取纠正措施,直到到达相位4
根据选型检查电机产品目录号
显示固定的4(相位4)
驱动器配置(组态)完成,当前处于活动状态
状态指示灯参见出版号2094-um001-zh-p(Kinetix6000多轴伺服驱动器)169页“IAM/AM模块状态指示灯”
闪烁显示E,后面显示两个数字。
驱动器发生故障,处于故障状态
故障代码请参见出版号2094-um001-zh-p(Kinetix6000多轴伺服驱动器)165-168页“Kinetix6000驱动器系统故障代码”
伺服驱动器(伺服放大器)模块状态指示灯含义。
驱动器状态指示灯
变频器状态
可能的解决办法
灭
正常,无故障
无
红色常亮
驱动器发生故障,处于故障状态
故障代码请参见出版号2094-um001-zh-p(Kinetix6000多轴伺服驱动器)165-168页“Kinetix6000驱动器系统故障代码
伺服驱动器(伺服放大器)模块通信状态指示灯含义。
通信状态指示灯
变频器状态
可能的原因
可能的解决办法
灭
无通信
光纤连接松脱
确认光纤电缆的连接适当
光纤电缆破损
更换光纤电缆
接收光纤电缆接到了SERCOS发送连接器,反之亦然
检查SERCOS光纤电缆的连接是否正确
绿色闪烁
正在建立通信
系统仍处于建立SERCOS通信的过程中
等待指示灯变为绿色常亮
驱动器模块上的节点地址设置与控制器中的配置不相符
确认节点地址开关设置是否正确
绿色常亮
通信就绪
无故障或失效
无
伺服驱动器(伺服放大器)模块母线状态指示灯含义。
母线状态指示灯
母线状态
状况
灭
无电源或直流母线不存在
1、当母线电源未接通时,为正常现象
2、存在故障
从IAM存在母线电缆
1、在Logix5000应用程序中,没有将IAM模块配置为CommonBusFollow(公关母线从动)
2、施加直流母线电压后,在正常情况下,指示灯开始闪烁绿色之前有2.5秒的延时,从而使公共母线主模块有时间进行预充电
绿色闪烁
存在母线电源,轴禁用。
无故障
下列情况下为正常:
1、没有向硬件使能输入(IOD-2)端施加24V电压
2、Logix5000程序中未下达MSO指令
绿色常亮
存在母线电源,轴启用。
无故障
下列情况下为正常:
1、向硬件使能输入(IOD-2)端施加了24V电压
2、Logix5000程序中下达了MSO指令
A、连接诊断。
要测试的是:
在进行连接测试之前
如果伺服放大器是Ultra3000,要检验其如下状态:
--7段数字显示器显示4(表示驱动器配置完毕,并处于活动状态)
--ModuleStatus(模块状态)指示灯为绿色闪烁(表示伺服环未闭合=0)
--NetworksStatus(网络状态)指示灯保持绿色
如果伺服放大器是Ultra6000,要检验其如下状态:
--数字显示器显示4(表示驱动器配置完毕,并处于活动状态)
--Bus(总线)指示灯绿色闪烁(表示伺服环未闭合=0)
--Comm(通讯)指示灯保持绿色
在“AxisProperties–Axis0”对话框中的“Hookup”(Hookup[hʊkʌp]连接,接线图)选项卡。如下图所示。
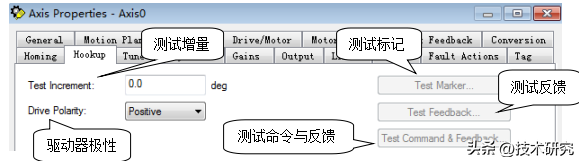
TestIncrement:测试增量。(Test[test]:测试;考验。Increment[ɪŋkrəmənt]:增长,增量;增额)。输入测试时轴所需移动的距离。此处输入360度。
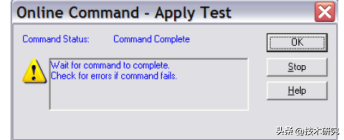
【翻译:手动将轴转动足够大的范围以产生一个标记脉冲信号,并等待命令状态由正在执行中的状态改变为完成状态。如果本次测试标记命令失败,请检查错误产生的原因】
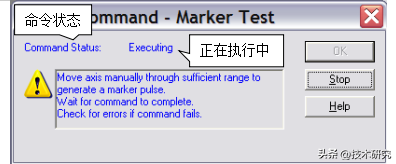
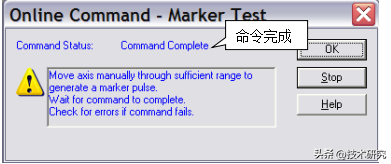
在手动转动轴期间,观察“CommandStatus”(命令状态),当显示由“Executing”(正在执行中)最后变为“CommandComplete”(命令完成)。此时“OK”按钮变为可用状态。

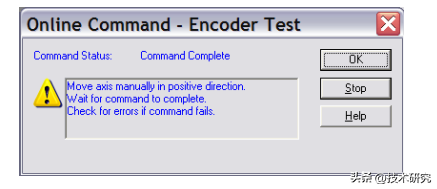
【翻译:在线命令会产生运动。在测试执行期间,观察轴运动的方向。执行在线命令吗?】
电机开始旋转,此时注意观察轴运转的方向以及电机运转是否有异常。
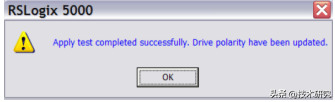
在测试期间,约3S后,电机顺时针旋转一周,且旋转一周的同时,伺服驱动器的“ModuleStatus”(模块状态)或者Bus(总线)指示灯由绿色常亮状态变为闪烁状态(表示伺服环已经断开=0)。当“CommandStatus”(命令状态)由“Executing”(正在执行中)变为“CommandComplete”(命令完成)。此时“OK”
按钮变为可用状态。如下图所示。
【翻译:轴的运转方向是正方向(顺时针)吗?】
【翻译:等待命令状态由正在执行中的状态改变为完成状态。如果本次测试命令失败,请检查错误产生的原因】
【翻译:执行测试成功完成,驱动器极性已经被更新】
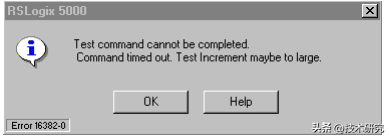
注意:如果测试失败,即出现下面所示的对话框。
【翻译:测试命令不能完成。命令超时,“TestIncrement”(测试增量值)可能设置的过大】
A、自动处理过程(自整定过程)(自动调试过程)。
自整定过程是为了设置和优化控制环的功能,使控制环获得最匹配的负载惯量,使得系统响应负载的变化时是平稳的。自整定期间,下列参数将被设置:
--比例增益。
--积分增益。
--最大速度、加速度、减速度。
如果在应用期间负载发生改变,必须对轴进行再次自整定测试。自整定测试过程必须在线进行。如果轴在“Limit”(限制)选项卡中设置了“SoftTravelLimit”(软件行程限制),则在自整定测试过程中必须要取消该限制。
在“AxisProperties–Axis0”对话框中的“Dynamic”([daɪˈnæmɪk]:动态的;动力的,动力学的)选项卡。如下图所示。
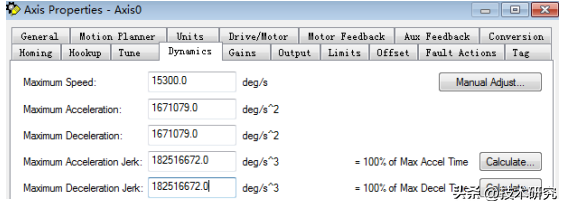
记录下轴的“MaximumSpeed”(最大速度)、“MaximumAcceleration”(最大加速度0)、“MaximumDeceleration”(最大减速度)的值,以备下面的步骤使用。
在“AxisProperties–Axis0”对话框中的“Tune”([tju:n]:曲调,曲子;(使)和谐,调谐;调整语调;心情)选项卡。如下图所示。
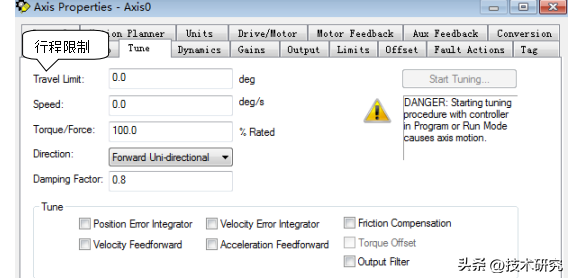
TravelLimit:行程限制。表示自整定期间轴能够移动的最大距离,即调节过程中不允许超出的行程范围。实际的调节过程中,电机轴通过传动机构或者直接与负载相连,所以该值的设置要防止调节过程中对机械设备的损坏,即要将该值设定在负载的限程内,但这并不意味着该值越小越好,如果SERCOS模块在轴运动已经超出行程限制之前,还未能完成对轴的调节,则会弹出对话框提示“Servotravellimitfault”(伺服行程限制故障),并终止调节过程。
Speed[spi:d]:速度。表示自整定期间轴可以达到的最大速度。一般应是最大动态速度的40%到80%之间。比如:当“MaximumSpeed”(最大速度)=15300时,则“Speed”(速度)=15300X40%=6120。
Torque/Force:扭矩/力。表示自整定期间传递给轴的最大转矩/力命令值,应该设置为允许的最大的安全转矩级别。一般来说,如果设置为较小的值,则是为了限制轴的重载。若设置为100,表示调节过程中轴的最大转矩/力为100%额定转矩。
Direction:方向。表示调试驱动器时命令的运动曲线的方向。如左图所示。一般设置为“ForwardUni-directional”(单向正向),表示在轴正方向(顺时针)运动时调节增益。
注意:“ForwardBi-directional”(双向正向)和“ReverseBi-directional”(双向反向)主要用于调节摩擦补偿(FrictionCompensation)和转矩偏移(TorqueOffset)。
DampingFactor[dæmpiŋˈfæktə]:制动阻尼因子(因数)(系数)。
注意:如果阻尼系数较小,对轴执行阶跃响应时会使轴产生不可控的振动。如果阻尼系数较大,虽然使系统的阶跃响应没有超调并且很稳定,但动态响应会变慢。
Tune:整定。实际使用中,需要根据电机轴所连接的实际负载情况、现场条件等因素,来进行适当的选择,从而使调节后的轴运动更加稳定,响应更加快速。主要由以下几项组成:
--PositionErrorIntegrator:位置误差积分器。决定是否计算位置积分增益。
--VelocityErrorIntegrator:速度误差积分器。决定是否计算速度积分增益。
--velocityFeedforward:速度前馈。决定是否计算速度前馈量。
--AccelerationFeedforward:加速度前馈。决定是否计算加速度前馈量。
--OutputFilter:输出过滤器。决定是否计算输出过滤带宽和是否使用输出低通滤波。
--TorqueOffset:扭矩偏移量。决定是否计算转矩偏移量,此值将在“Offset”(偏移量)页面“Torque/ForceOffset”(扭矩/力偏移量)中被使用。如果此处未选择,则对应的值=0。
--FrictionCompensation:摩擦补偿。(Friction[frɪkʃn]:摩擦(力);冲突)。决定是否计算摩擦补偿,此值将在“Offset”(偏移量)页面“FrictionCompensation”(摩擦补偿)中被使用。如果此处未选择,则对应的值=0。
单击“StartTuning”(开始整定)按钮开始整定,弹出如下对话框。
【翻译:在线命令可能导致轴的运动,执行在线命令吗?】
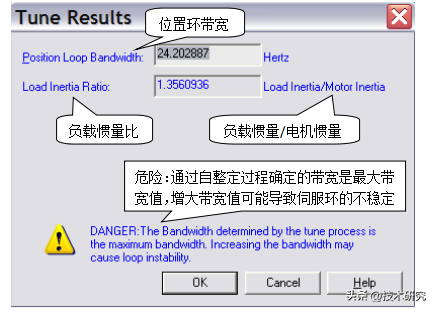
PositionLoopBandwidth:位置环带宽。表示运动轴位置给点的相应速度。一般来说,带宽越高响应越快。
LoadInertiaRatio:负载惯量比。(Load[ləʊd]:负载。InertiaRatio[iˈnə:ʃjəˈreiʃiəu]:惯性(量)比)。表示负载惯量和电机惯量之间的比值。
其中“CommandStatus”(命令状态)显示为“CommandComplete”(命令完成)。
【翻译:等待命令状态由正在执行中的状态改变为完成状态。如果本次测试命令失败,请检查错误产生的原因】
【翻译:应用自整定成功完成,自整定相关的属性已被更新,可以参考帮助列表】
如果测试失败,弹出下图所示的对话框。
【翻译:自整定命令不能完成,命令超时】
自整定过程改变的相关属性(参数):
“Gain”(增益)选项卡
VelocityFeedforwardGain(速度前馈增益)
AccelerationFeedforwardGain(加速度前馈增益)
PositionProportionalGain(位置比例增益)
PositionIntegralGain(位置积分增益)
VelocityProportionalGain(速度比例增益)
VelocityIntegralGain(速度积分增益)
“Dynamic”(动态)选项卡
MaximumVelocity(最大速度)
MaximumAcceleration(最大加速度)
MaximumDeceleration(最大减速度)
“Output”(输出)选项卡
TorqueScaling(转矩缩放)(转矩比例)
VelocityScaling(速度缩放)(速度比例)
LowPassOutputFilter(低通输出滤波器)
“Limit”(限制)选项卡
PositionErrorTolerance(位置偏差容限)
自整定调节过程中可能遇到的普遍故障。
1、”TuneSpeed”(调节速度)设置的过低。如下图所示。检查其值是否为“Dynamic”(动态)选项卡中“MaximumSpeed”(动态最大速度)的40%至80%。
【翻译:调节速度过低,自整定命令不能完成】
2、”TuneSpeed”(调节速度)确实在40%至80%之间,但仍然失败的话,可能是因为机械未能和带负载的电机相匹配。
自整定命令不能完成,伺服行程限制故障。如下图所示。可能存在的原因:
1、“TuneTravelLimit”(调节行程限制)设置的过低。
2、“TuneSpeed”(调节速度)确实在40%至80%之间,所以调节速度没有达到造成限制故障。
本文链接:https://goko.jsntrg.cn/618100949126.html