PLC伺服换算技巧


因为经济原因,我们使用伺服马达,首先会考虑PLC自带脉冲控制方式,这样不会有额外模块费用。一般伺服的额定转速3000r/min,而我们一般PLC自带的脉冲最大速度是200Kpulse/s。那么要保证额......
因为经济原因,我们使用伺服马达,首先会考虑PLC自带脉冲控制方式,这样不会有额外模块费用。
一般伺服的额定转速3000r/min,而我们一般PLC自带的脉冲最大速度是200Kpulse/s。那么要保证额定转速3000r/min,每转的脉冲量为200k除以额定转速3000r/min,然后再乘以时间单位差60,则算出来的每转脉冲量为4000pulse。

伺服位置和速度设置
我们设置好每转脉冲量后,还需设置每转马达运动量。
由于我们设置了每转脉冲量,如每转运动量和脉冲量不是同等数量关系的时候,那么对应的PLC的每脉冲移动量不是倍量关系,即每脉冲走的是4/3um(上图示例),那么程序运算的时候如设置走1um,那么用上图设置是无法到达该位置的,程序的定位指令会无法到达而一直处于等待状态。
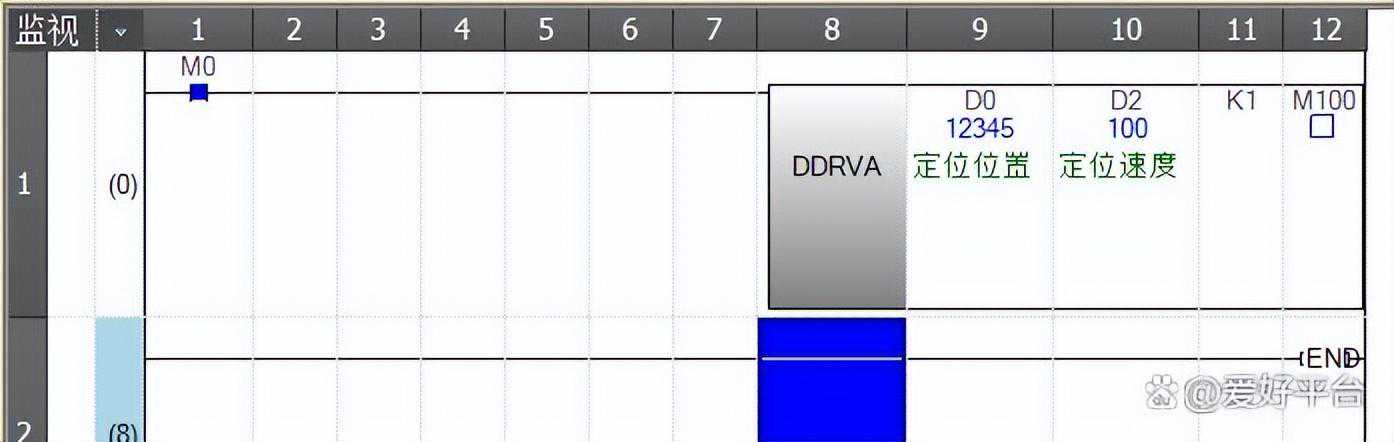
定位指令
那么要如何解决这个问题呢?
方法有很多种,比较简单的方法是,将每转脉冲量和每转移动量设成成一致,那么每脉冲就是走一个数量单位。但是该方法可能会导致无法到达额定转速。
另外一种方法是,设定的定位位置程序处理,重新计算成整数的脉冲量。但是该方法可能会给用户设定参数造成困扰。
如文中有错误的地方欢迎指正。
本文由admin于2024-11-11发表在精工资讯站,如有疑问,请联系我们。
本文链接:https://goko.jsntrg.cn/614155221590.html
本文链接:https://goko.jsntrg.cn/614155221590.html