三垦VM05变频器在定位控制中的应用


在控制领域,有以负载的位置或角度等为控制对象,如:从简单到高级,根据目的有各种控制方式。(开环位置控制、手动决定位置、闭环位置控制);控制对象的位置以转速积分的形式变化;即使不在负载上直接装设位置传感......
在控制领域,有以负载的位置或角度等为控制对象,如:
从简单到高级,根据目的有各种控制方式。(开环位置控制、手动决定位置、闭环位置控制);
控制对象的位置以转速积分的形式变化;
即使不在负载上直接装设位置传感器,多数场合仅由电机的旋转角也可高精度地推定位置;
需要可逆运转
控制方式用途运转时的位置控制机床、机器人、雷达天线等停止时的位置控制电梯、起重机械、调节风门、行车等以前这些场合大都由伺服电机和伺服电机控制器来完成位置控制。随着通用变频器技术的发展,在位置控制中交流变频传动得到了越来越广泛的应用。三垦在这方面做了有益的尝试。位置控制的共同特点:闭环位置控制的方法: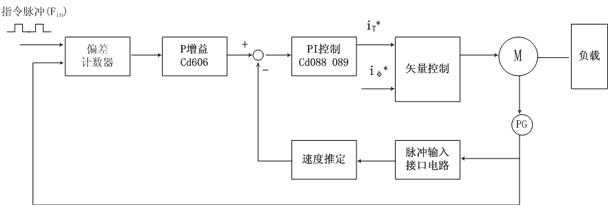
在这种用途中,PG产生两个具有90°相位差的脉冲序列,监视这两个脉冲信号上升的顺序可以判别正反转。还有电机每转一圈,在特定的转子位置上产生显示器脉冲,可以用作位置原点的确定。
应用实例:现使用Samco-VM05的定位控制(PointtoPoint控制)功能,在江苏某铜管生产企业生产线上代替伺服系统,达到了在满足工艺条件的基础上降低成本的目的。1、系统构成: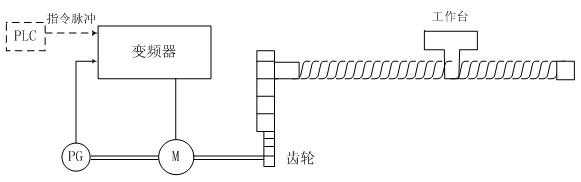
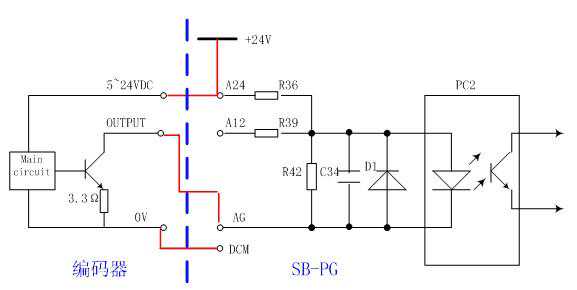
2、编码器(PG)为开路集电极输出,与SB-PG基板接线如下:
仅为变更代码.
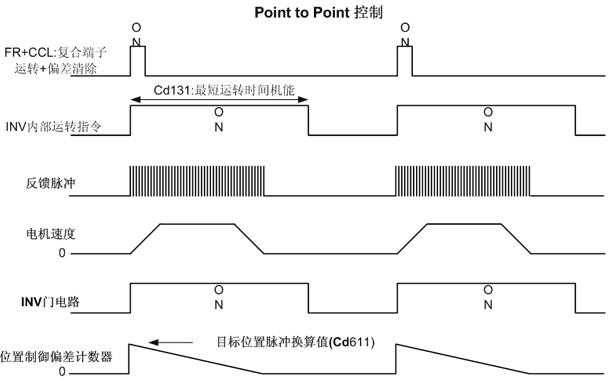
4、时序图:
通常先进行闭环速度控制的调节,Cd088、Cd089调整至合适值,再进行位置控制Cd606的调节。
电机和变频器都应良好接地,防止干扰。
根据工艺要求,也可以由PLC给出指令脉冲序列,进行连续路径控制(ContinuePathControl)。
本文由admin于2024-11-15发表在精工资讯站,如有疑问,请联系我们。
本文链接:https://goko.jsntrg.cn/110531271432.html
本文链接:https://goko.jsntrg.cn/110531271432.html