【原创教程】欧姆龙PLC通过电子凸轮控制轴运动


1绪论1.1本文的目的欧姆龙NJ系列PLC可在SysmacStudio软件通过编制电子凸轮实现3个轴的精准同步控制。本文详细叙述了在SysmacStudio软件通过设置电子凸轮参数实现3轴同步控制。1......
1绪论
1.1本文的目的
欧姆龙NJ系列PLC可在SysmacStudio软件通过编制电子凸轮实现3个轴的精准同步控制。本文详细叙述了在SysmacStudio软件通过设置电子凸轮参数实现3轴同步控制。

1.2准备工作
1.2.1硬件
PLC:NJ301-1200
驱动器和电机:R88D-KN50F-ECT
1.2.2软件
编程软件:SysmacStudio
1.3硬件接线
1.3.1通信接线
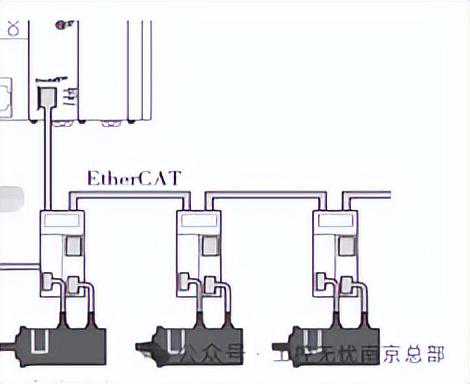
R88D-KN50F-ECT伺服驱动和PLC之间通EtherCAT网络进行通讯。可用网线直接把PLC和伺服连接起来。驱动器和电机之间有动力线和编码器线要连接。
2软件操作
2.1EtherCAT网络配置
打开SysmacStudio,新建NJ工程。在EtherCAT网络配置里添加3台R88D-KN50F-ECT伺服,节点号分别为1、2、3。

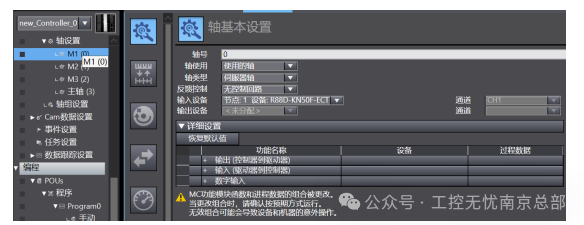
2.2从轴设置
在轴设置里添加3个轴变量,重命名为M1、M2、M3。轴类型设置为伺服轴,输出设备分别选择三台R88D-KN50F-ECT伺服,其他轴参数使用默认设置。
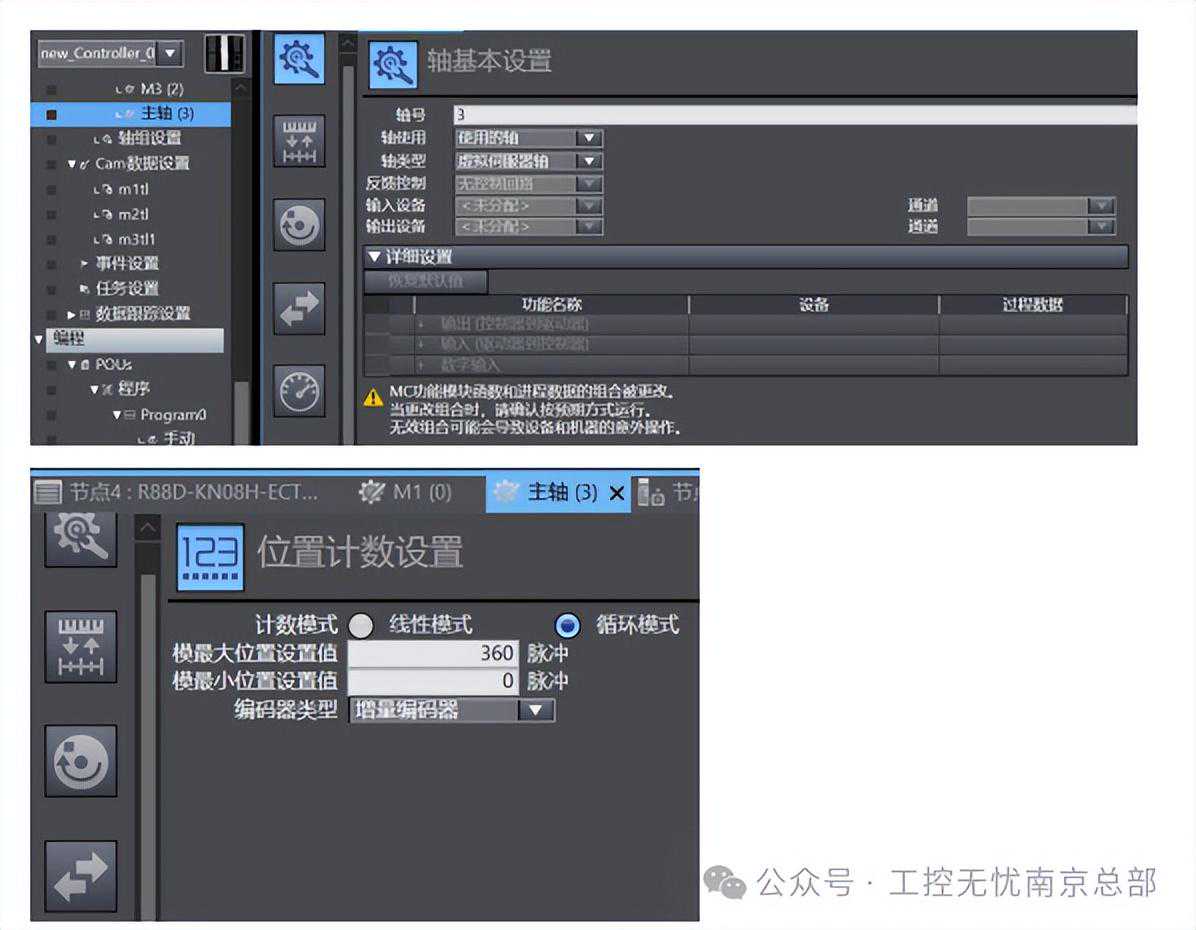
2.3主轴设置
主轴类型设置为虚拟伺服轴。为了模拟凸轮的旋转角度动作,方便凸轮表数据追踪观察,将主轴的计数模式设为循环模式,上限设置为360,下限设为0。
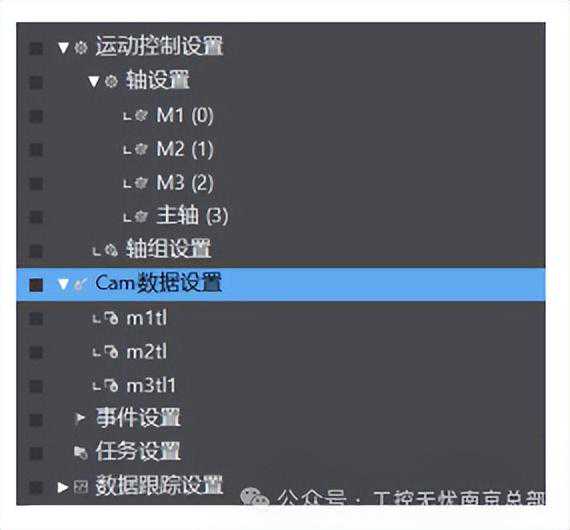
2.4添加新的凸轮表
右键Cam数据设置-添加-CamProfile,来添加新的凸轮表,默认名称CamProfile0,添加3个凸轮表,重命名为“m1tl”、“m2tl”、“m3tl1”。
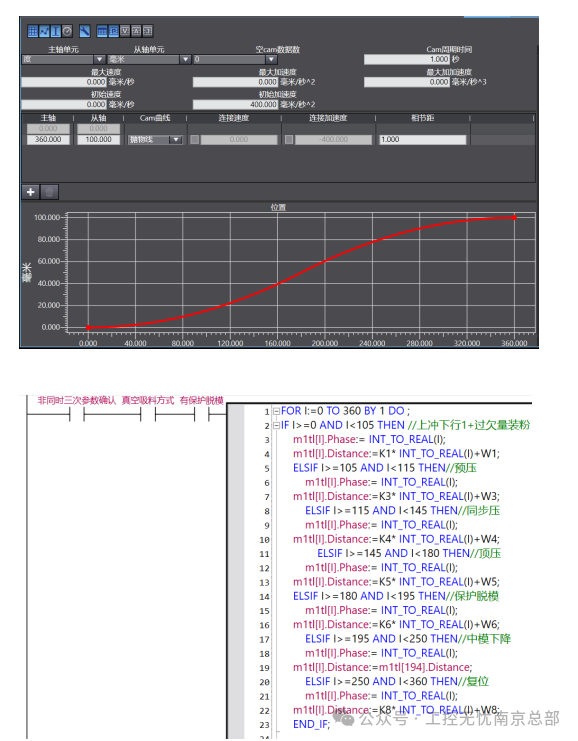
2.5设置凸轮表
设置凸轮表,可通过如下表格,也可通过在程序里对参数的赋值来完成曲线的设置。
3PLC编程
3.1编程
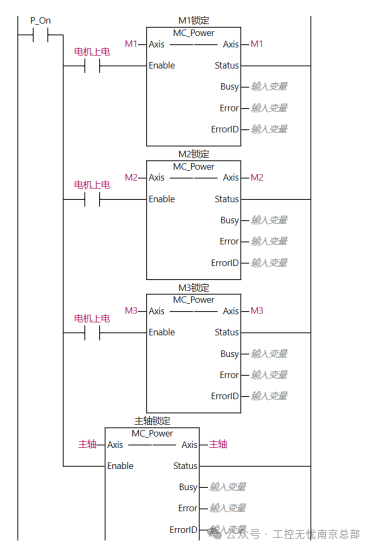
3.1.1轴使能、原点程序
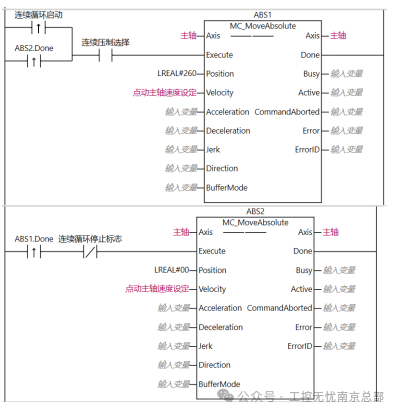
3.1.2主轴点动、与绝对运动程序
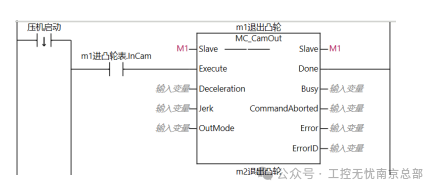
3.1.3电子凸轮耦合与电子凸轮解耦合程序
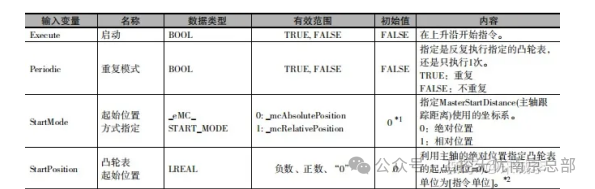
电子凸轮耦合时,要定义以下参数:主轴master、从轴slave、凸轮表camtable、上升沿启动execute、重复模式periodic(初始值为FALSE/0不重复,此处改为TRUE/1)。
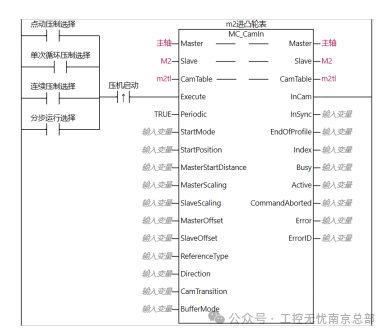
以下图表所示为输入变量的含义和取值。

3.2曲线图绘制
3.2.1通过从轴.Distance和从轴.Phase来设置曲线,无法直观的看出曲线,可通过编程,在威纶通触摸屏上显示出曲线。
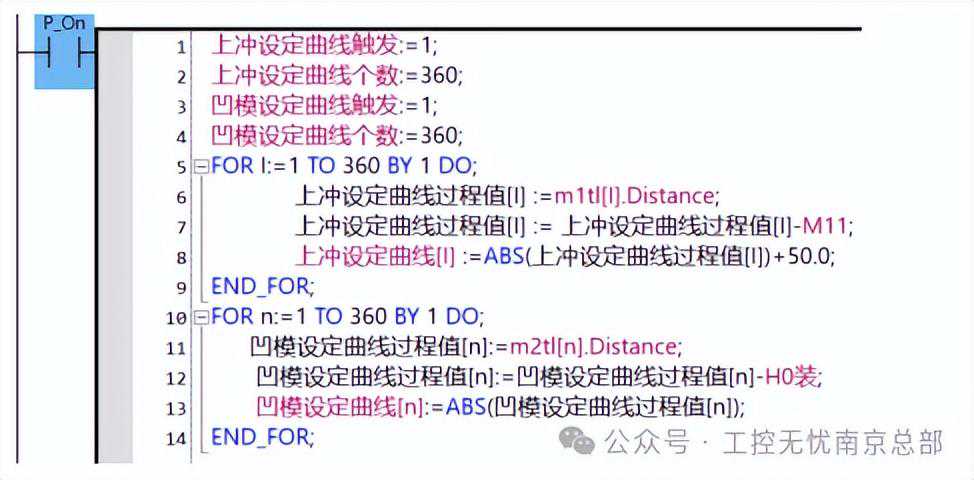
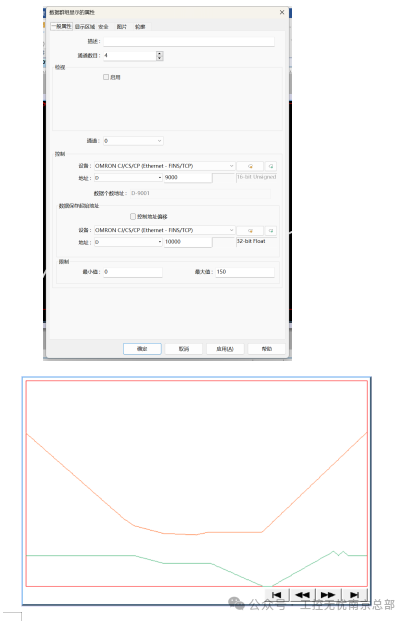
在威纶通里运用“群组显示曲线”,D9000为控制地址,当设数值为1时:绘制折线图,当设数值为2时:清除折线图,当设数值为3时:先清除折线图,再绘制折线图。D9001为数据个数地址,设置通道欲显示数据群组的数量,最多可达1024个点。D10000为数据保存起始地址。触摸屏在线模拟后,显示曲线图如下:
本文链接:https://goko.jsntrg.cn/810735643332.html