Canopen总线基础(1)


在Somachine控制平台设计一个复杂的机器控制系统,最优的结构就是使用CANopen总线,把诸多的控制元素诸如变频器,伺服驱动器,传感器,开关按钮等通过一条电缆连接起来,共享各个控制单元的状态信息......
在Somachine控制平台设计一个复杂的机器控制系统,最优的结构就是使用CANopen总线,把诸多的控制元素诸如变频器,伺服驱动器,传感器,开关按钮等通过一条电缆连接起来,共享各个控制单元的状态信息,控制指令等,如图12-1-1所示。大量使用CANopen总线不仅由于其通讯速度大大高于Modbus,更是由于其良好的抗干扰能力和简单的物理安装结构及组态方式。这章我们就来讨论CANopen总线的特性及应用。

图12-1-1带有CANopen总线的控制系统
12-1CANopen总线基础
CANopen是一种架构在控制局域网路(ControlAreaNetwork,CAN)上的高层通讯协定,包括通讯子协定及设备子协定常在嵌入式系统中使用,也是工业控制常用到的一种现场总线。
CANopen实际作了OSI模型中的网络层以上(包括网络层)的协定。CANopen标准包括寻址方案、数个小的通讯子协定及由设备子协定所定义的应用层。CANopen支持网络管理、设备监控及节点间的通讯,其中包括一个简易的传输层,可处理资料的分段传送及其组合。一般而言资料链结层及实体层会用CAN来实际操作。
基本的CANopen设备及通讯的协定定义在CANinAutomation(CiA)标准301中。针对个别设备的子协定以CiA301为基础再进行扩充。如针对I/O模组的CiA401及针对运动控制的CiA402。其通讯架构如图所示。
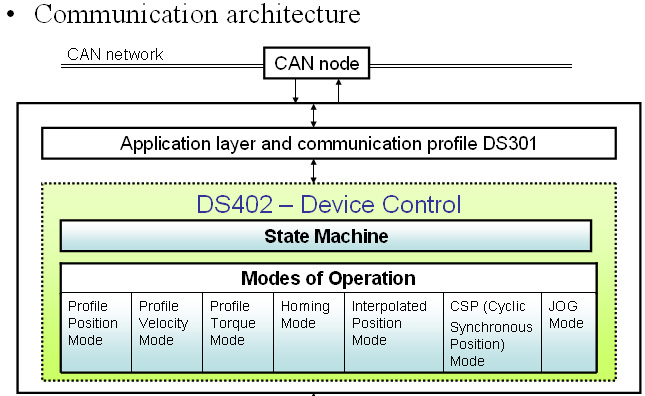
图12-1-1CANopen总线架构
凭借其可靠,实时,灵活,经济的特点而被广泛应用,并且已成为国际标准。CANopen协议是在现场总线CAN-BUS之上定义的一套应用层协议,其核心是对象字典及多种通信方式。对象字典是应用单元和通讯单元之间的接口,实际上是设备的所有参数列表。应用单元和通讯单元都可访问这个参数列表。对象字典中的条目(对象或参数)通过一个16位索引(Index)和一个8位子索引(Subindex)进行识别或定位,用户可对条目进行读或写。对象字典的结构如表12-1-1所示。
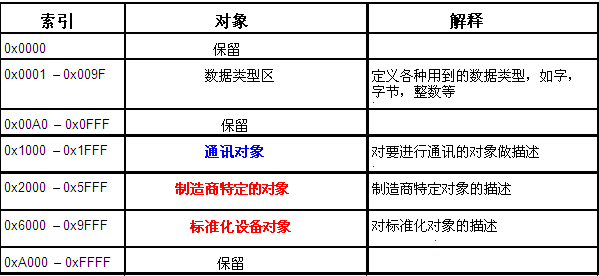
表12-1-1对象字典的分配
对象字典描述了对象设备的所有功能。例如伺服驱动器的索引6060:0定位到了设备的运行模式,后面跟的数据确定了运行模式。如图12-1-2所示。
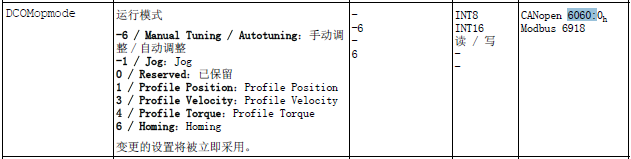
图12-1-2对象字典定位设备运行模式
每个设备制造商会为自己的设备做好一个ASCII码格式的对象字典,即电子数据表EDS(ElectronicDataSheet)文件。这个电子数据表可以导入到控制器,实现控制器与设备的CANopen通讯。好了,让我们再来梳理一下有关的CANopen通讯要用到的概念和名称。
设备通讯
通讯单元处理和网络上其他模组通讯所需要的通讯协定。设备的启动及重置由状态机(stateMachine)控制。状态机需包括以下的几个状态:初始化Initialization,预运行Pre-operational,运行Operational及停止Stopped。当接收到网络管理(NMT)通讯对象,状态机会转换到对应的状态。对象字典(ObjectDictionary)是一个有16位元索引(Index)的变量阵列。每个变量可以(但非必须)有8位元的子索引(Subindex)。变量可用来调整设备的组态,也可以对应设备量值的数据或设备的输出。当状态机设定为operational之后,设备的应用(application)部分就会实现设备预期的功能。此部份可以由对象字典中的变量调整其设定,而数据由通讯层传输或接收。
对象字典
CANopen设备都需要具备对象字典,用来设定设备组态及进行非即时的通讯。对象字典的入口定义如下:
索引(Index):对象16位元的位址。对象名称(Objectname):一个代表对象的符号类型,可以是阵列、纪录或只是一个变量。名称(Name):描述此入口的字串。形态(Type):变量的数据形态。属性(Attribute):提供此入口是否可读/可写的数据,有下列四种:可读/写、只读、只写、只读常数。必须(Mandatory)/可选(Optional)字段定义属于特定设备规范下的设备,是否必须实现某些对象。在CANopen标准中定义了对象字典中的基本资料型态,包括逻辑值、整数及浮点数。也定义了复合对象:如阵列、记录及字串。复合对象用一个8位元的数值作为其子索引(subindex)。记录或阵列中子索引0的位置记录此数据结构的元素个数,资料型态为UNSIGNED8。
例如在CiA301标准中,设备通讯的参数放在索引范围0x1000-0x1FFF(通讯行规区)。此区域的前几项如下表:
索引
对象名称
名称
形态
属性
M/O
0x1000
变量
设备类型
UNSIGNED32
只读
M
0x1001
变量
错误寄存器
UNSIGNED8
只读
M
0x1008
变量
工厂设备名
字符串
常数
O
表12-1-2通讯定义区
若配合适当的工具,可以用编辑电子数据表(electronicdatasheet,EDS)档案的方式规划一个设备,并且将变量的数值上传到设备中。EDS档案的格式通常会是INI文件。
通讯对象
CANopen的物理层CANbus每次传送的资料量不大,其中包括11位元的ID、远端传输请求(RTR)位元及大小不超过8位元的数据。CANopen将CANbus11位元的ID分为4位元的功能码及7位元的CANopen节点ID。7位元的ID共有128种不同的组合,其中ID0不使用,因此一个CANopen网络上最多允许127台设备。CANbus在规格中允许29位元的ID,因此若配合使用,CANopen网络上可以超过127台设备,不过在实际运用中,大多数的CANopen网络上设备数量均低于此数值。
CANopen将CANbus的11位元ID称为通讯对象ID(COB-ID)。当传输数据出现碰撞时,CANbus的仲裁机制会使COB-ID最小的讯息继续传送,不用等待或重传。COB-ID的前4个位元是CANopen的功能码,因此数值小的功能码表示对应的功能重要,允许的延迟时间较短。
以下表是一个标准的CANopen帧:
功能码
节点ID
RTR
数据长度
数据
长度
4位元
7位元
1位元
4位元
0-8字节
表12-1-3CANopen通讯帧
在CANopen标准中,部份COB-ID被保留作网络管理及SDO通讯用。而在设备初始化后,有些功能码和COB-ID会对映到标准的功能,不过后续仍可以规划为其他用途。
通讯模型
CANopen设备间的通讯可分为以下三种通讯模型。
在master/slave模型中,一个CANopen设备为主站master,负责传送或接收其他设备从站(称为slave)的数据。NMT协定就使用了master/slave模型。客服(client/server)模型定义在SDO协定中,SDO客户将对象字典的索引及子索引传送给SDO服务员,因此会产生一个或数个需求数据(对象字典中,索引及子索引对应的内容)的SDO封包。生产者/消费者(producer/consumer)模型用在HeartbeatandNodeGuarding协定。由一个生产者送出数据给消费者,同一个生产者的数据可能给一个以上的消费者。又可分为二种:推送方式push-model:生产者会自动送出数据给消费者。拉进方式pull-model:消费者需送出请求讯息,生产者才会送出数据。
NMT协定
NMT协定NMT(网络管理,Networkmanagement)协定会定义(设备内部)状态机的状态变更命令(如启动设备或停止设备)、侦测远端设备bootup及故障情形。
NMTmaster使用的模组控制协定可变更设备的状态。其COB-ID为0,其功能码及节点ID均为0,因此网络上的所有节点均会处理这个讯息。在此讯息的数据部份会有此讯息实际针对节点的ID,此ID也可为0,表示所有节点都要变更为指定的状态。
使用功能块可以从控制器应用程序控制CANopen设备的NMT状态。例如,我们用此功能块复位CAN总线或总线上的某个节点。
功能块通过执行对CANopen目标设备的NMT服务请求,来执行请求的NMT状态转换。
_STATEENUM
NMT状态机描述主要操作中的NMT从站的初始化和状态。
下图显示的是NMT状态、关联的可用通讯对象(PDO、SDO、SYNC、EMCY和NMT)和5种状态转换(A到E)。
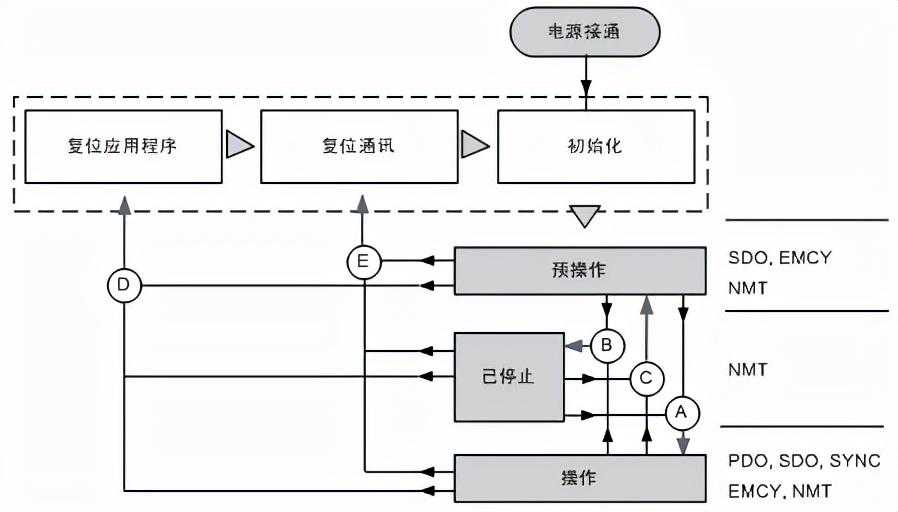
图12-1-3网络管理状态及其转换
_STATE枚举类型包含下表中介绍的NMT状态转换命令。

表12-1-4_STATE的枚举变量及功能
心跳协定(Heartbeatprotocol)是用来监控网络中的节点及确认其正常工作。心跳讯息的生产者(一般是slave设备)周期性的送出功能码1110、ID为本身节点ID的讯息,讯息的资料部份有一个表示节点状态的位元。而心跳讯息的消费者负责接收上述资料,若在指定时间(于设备的对象字典中定义)内,消费者均未收到讯息,可采取相关行动(例如显示错误或重置该设备)。
其格式为:
COBID+DATA(statusofnode)CANopen设备需要在bootup时自动从Initializing状态切换至Pre-operational状态,设备会在切换完成后送出一个心跳讯息,这就是心跳协定。
有一种pullmodel的NMT协定,称作节点监控(Nodeguarding)协定,也可以作从机的监控。
服务数据对象(SDO)协定
服务数据对象(SDO)可用来存取远端节点的对象字典,读取或设定其中的数据。提供对象字典的节点称为SDOserver,存取对象字典的节点称为SDOclient。SDO通讯一定由SDOclient开始,并提供初始化相关的参数。
在CANopen的术语中,上传是指由SDOserver中读取数据,而下载是指设定SDOserver的数据。
过程数据对象(PDO)协定
过程数据对象(PDO)协定可用来在许多节点之间交换即时的数据。可透过一个PDO,传送最多8字节(64位元)数据给一设备,或由一设备接收最多8字节(64位元)的数据。一个PDO可以由对象字典中几个不同索引的资料组成,规划方式则是透过对象字典中对应PDO配置及PDO参数的索引。
PDO分为两种:传送用的TPDO及接收用的RPDO。一个节点的TPDO是将资料由此节点传输到其他节点,而RPDO则是接收由其他节点传输的资料。一个节点分别有4个TPDO及4个RPDO。
PDO可以用同步或异步的方式传送:同步的PDO是由同步SYNC讯息触发,而异步的PDO是由节点内部的条件或其他外部条件触发。例如若一个节点规划为允许接受其他节点产生的TPDO请求,则可以由其他节点送出一个没有数据但有设定RTR位元的TPDO(TPDO请求),使该节点送出需求的数据。
借由RPDO也可以使两种设备同时启动。
除了定义对象字典,CANopen协议还定义了网络拓扑结构,如图12-1-3所示。即连接各个设备站点的电缆是带屏蔽的双绞线,传输线的终端电阻为120欧姆。在整个网络中包括主站在内的站点数,最多不能超过127个。电缆的信号为CAN_H,CAN_L和CAN_GND。在同一网络内,各个站点的通讯速率要求配置一样。通讯速率根据传输距离的大小而有不同。请参见表12-1-2电缆长度和速率的配置。
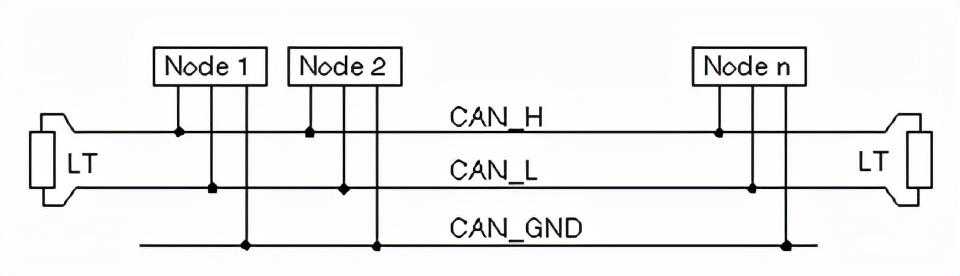
图12-1-3CANopen总线的物理结构

表12-1-2电缆长度和速率的设置
在控制器上的CANopen总线口被设计为D型9针口,如图12-1-4所示。在运动控制器中有2个CANopen总线口,一个是通用总线口,一个是可以做多轴同步的总线口,我们称为CANmotion总线口。

图12-1-4CANopen在控制器上的端口
D型插头的定义如图12-1-5所示。管脚定义如表12-1-3所示。
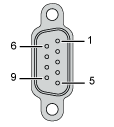
图12-1-5CANopen接线的规定
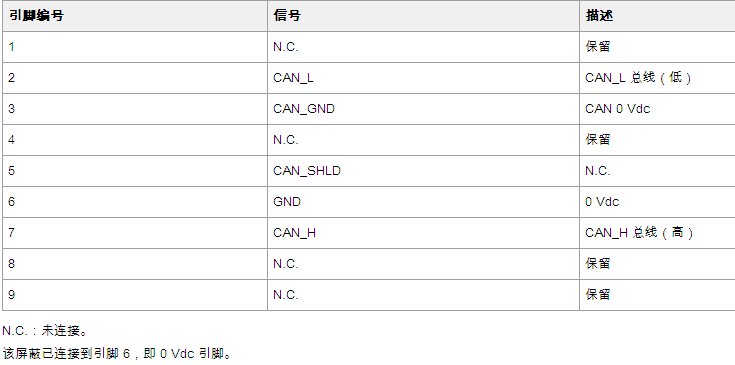
表12-1-3D型9针插头的CANopen接线定义
通常CANopen现场总线,在现场中典型地使用带有D型插头的电缆,它的优点是抗干扰性强,可靠性高。在控制柜中采用RJ45电缆进行连接,它的的优点是布线简单又快捷。
驱动器上的CANopen总线RJ45端口定义如图12-1-6所示。
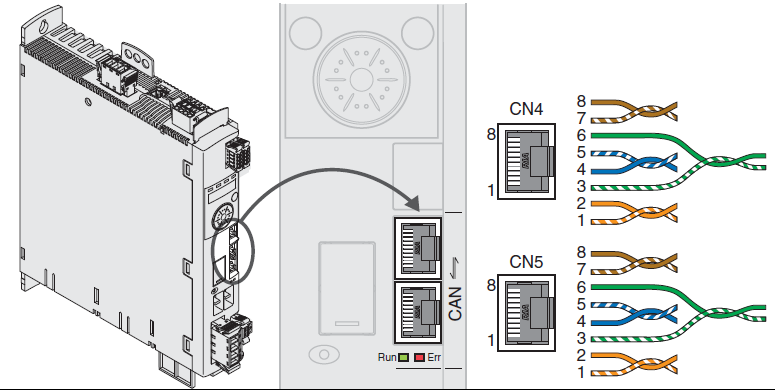
图12-1-6驱动器CN4和CN5上的CANopen接线图
注意:使用带有RJ45连接器的电缆时,最大总线长度减半。
当波特率为1Mbit/s时,传输线就限制为.3m。
RJ45接头定义如下:

图12-1-7RJ45CANopen管脚定义
这些定义都是CANopen总线的标准,这使得各个设备制造商提供的设备无论从软件配置还是硬件接线都有了统一的标准,总线互联变得非常方便。
本文链接:https://goko.jsntrg.cn/714513835282.html