PLC程序框架-步进电机-6


得空今天来搞一搞步进电机的控制,在此之前我们先聊聊需求:1,能点动。2,能走位置,并且有到位信号判断。3,实时位置、速度以及报警监控。下图为步进电机的操作界面效果图,仅供参考。步进电机的控制界面下面以......
得空今天来搞一搞步进电机的控制,在此之前我们先聊聊需求:
1,能点动。
2,能走位置,并且有到位信号判断。
3,实时位置、速度以及报警监控。
下图为步进电机的操作界面效果图,仅供参考。
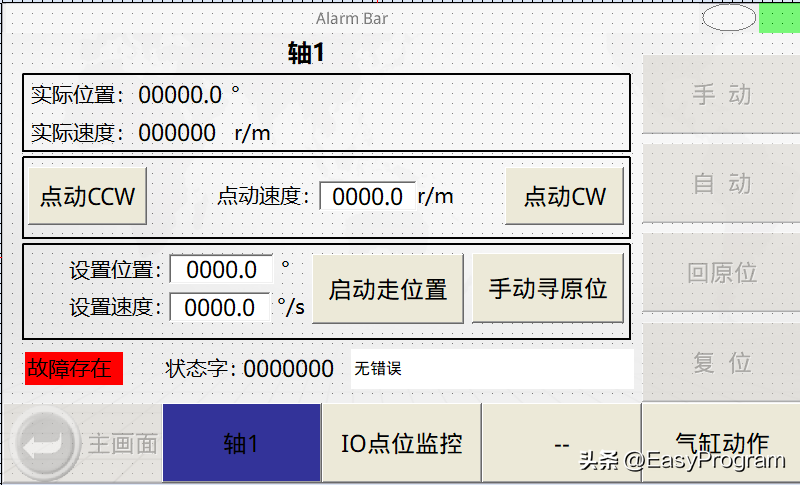
步进电机的控制界面
下面以Smart200为例,实现操作。
第一步:向导生成配置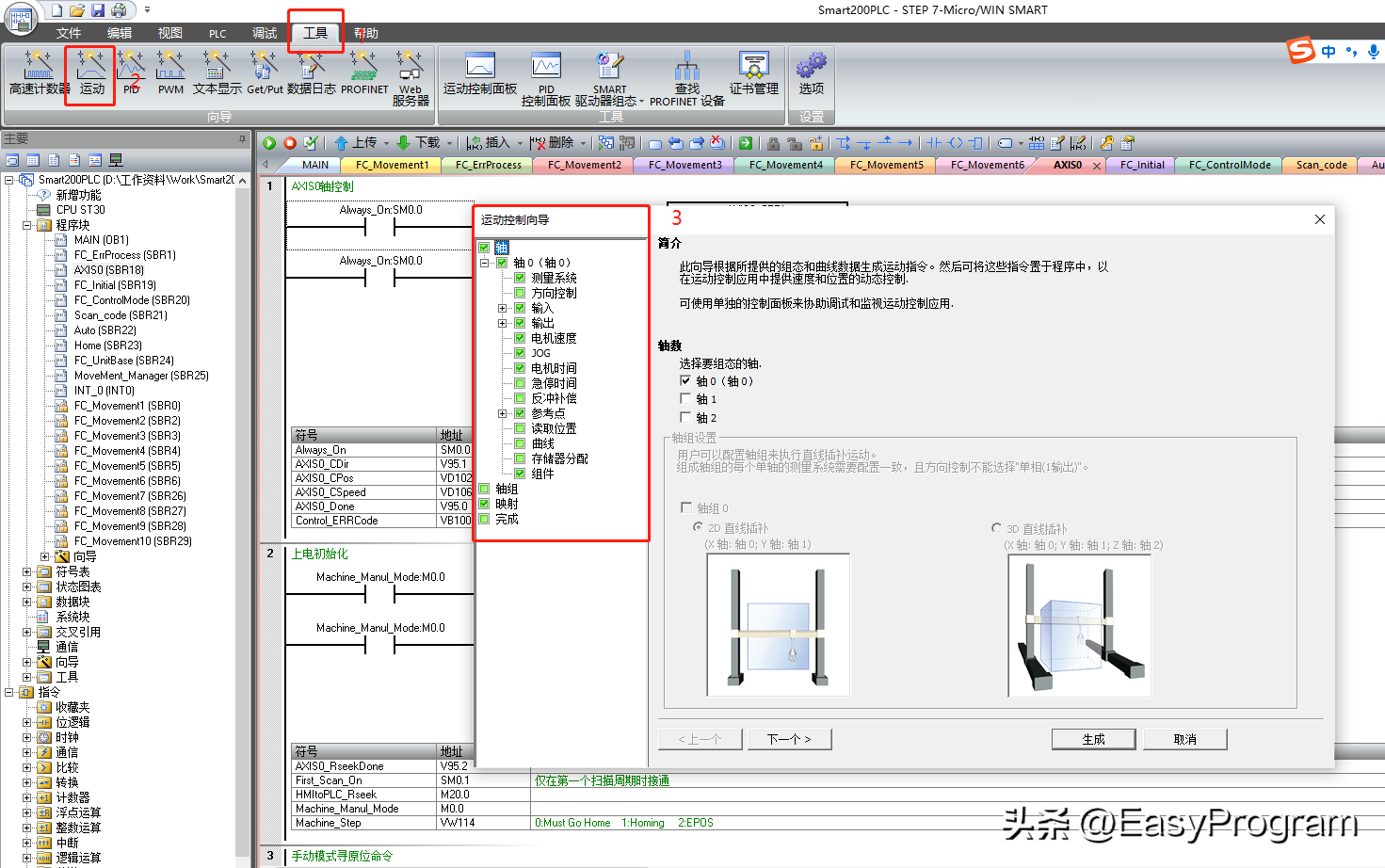
运动向导
向导生成控制程序根据实际情况调用
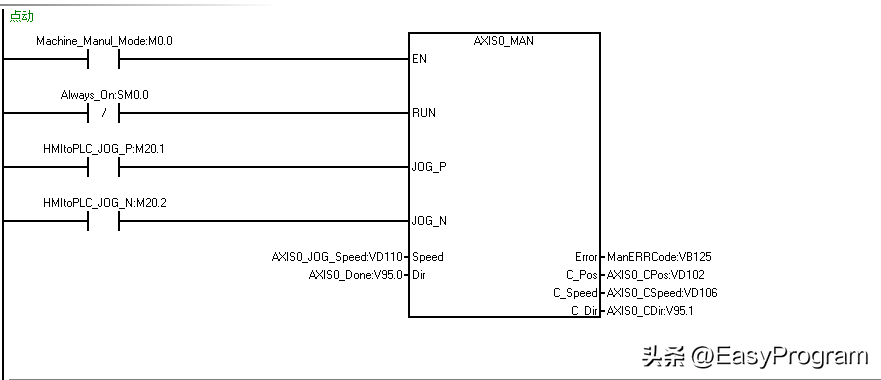
第二步:PLC程序编写1,新建一个子程序FC_AXSI_0。
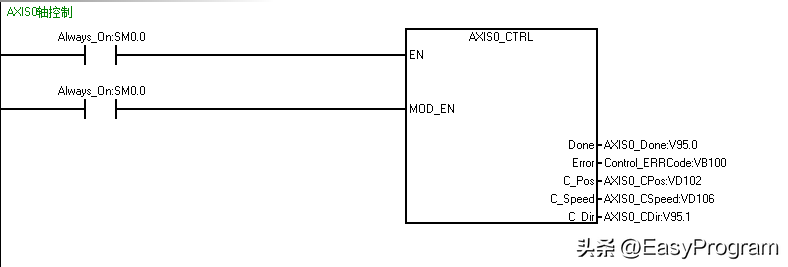
轴控制调用(必须调用)
2,回原位逻辑控制。
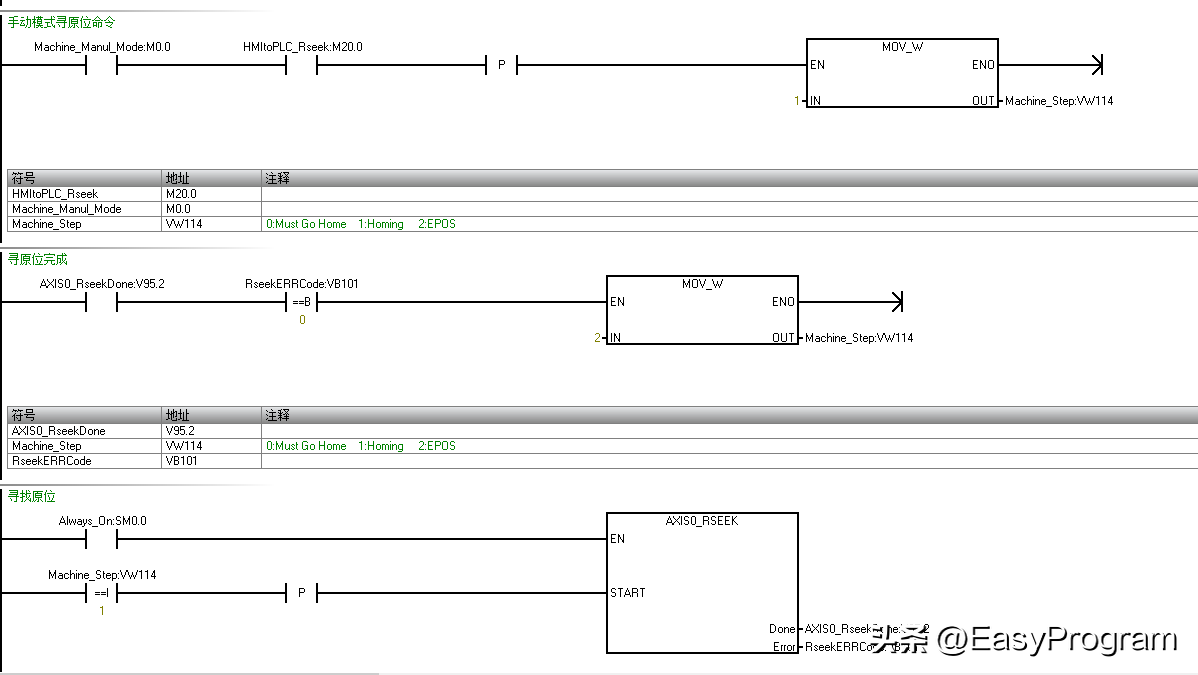
回原位逻辑
3,定位逻辑控制。注意定位操作,前提轴必须原位寻找完成。
定位控制逻辑
4,报错处理。报错能记录报错代码,根据报错代码来关联HMI的文本列表来进行报错提示。
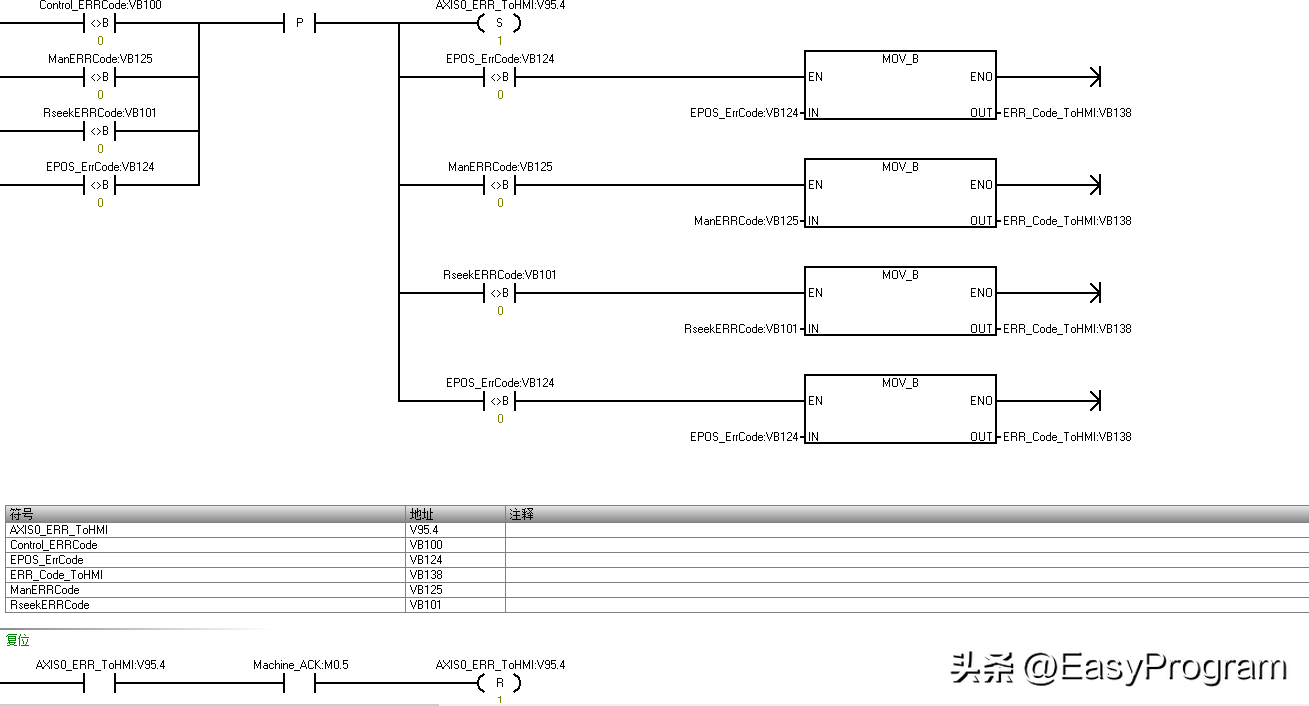
报错处理逻辑
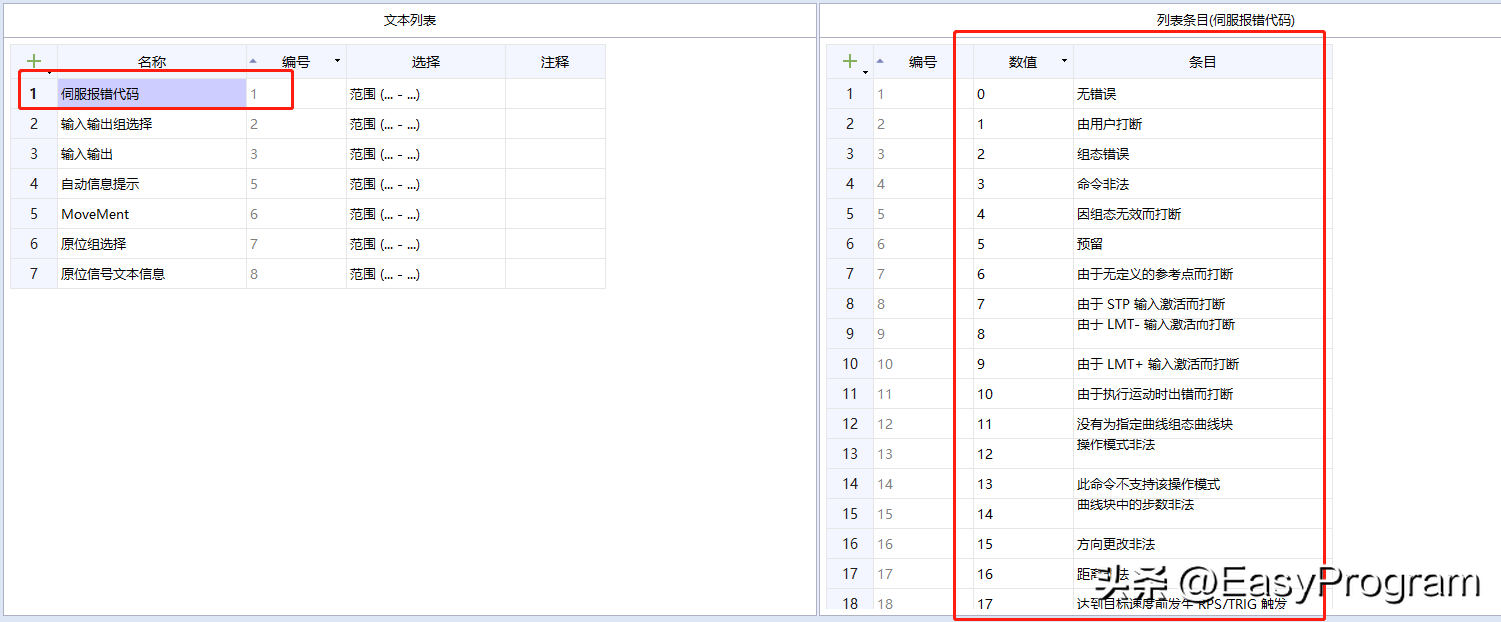
报错文本列表
5,到位判断逻辑。这里只通过软件来判断(不是闭环控制)电机是否到位,如果电机丢步(常出现在电机堵转的情况),软件是没有办法判断出来的。智能通过增加编码器,或者更换位伺服。

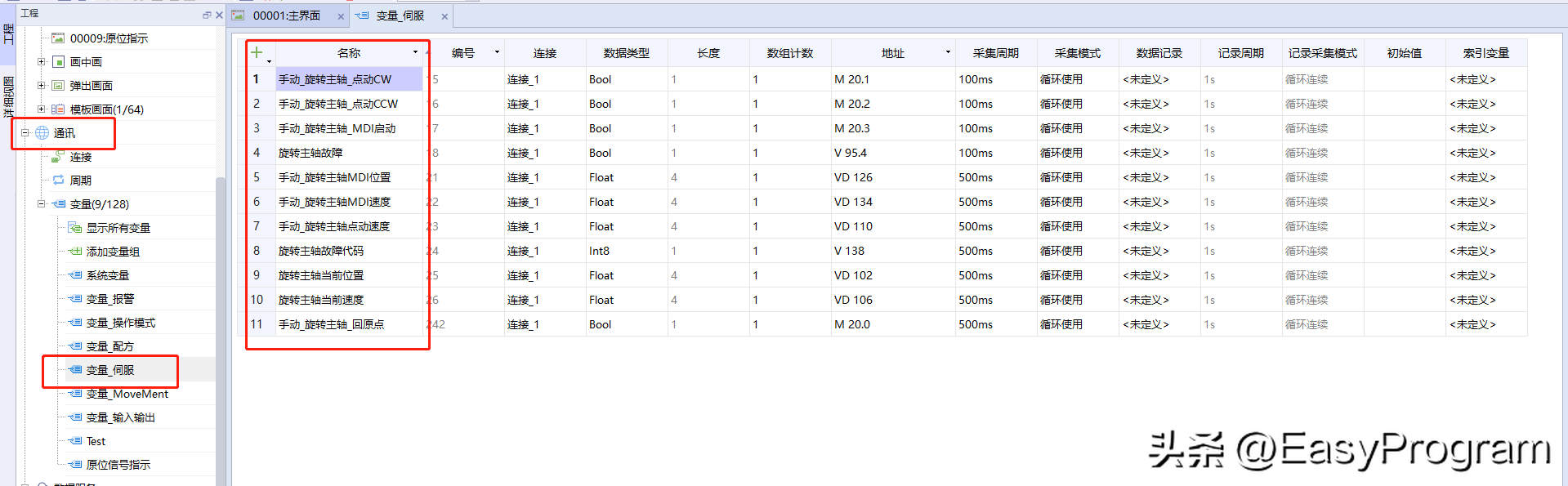
6,HMI界面编辑,变量关联。
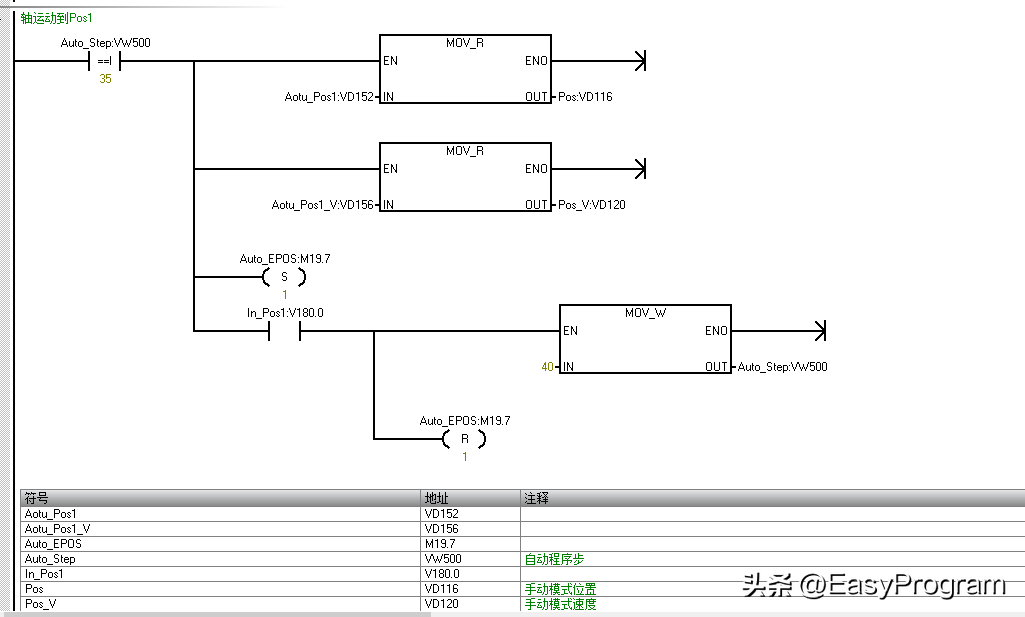
7,自动程序使用。先给位置和速度赋值,然后再给命令。到位后复位命令。
本文由admin于2024-12-15发表在精工资讯站,如有疑问,请联系我们。
本文链接:https://goko.jsntrg.cn/518573968305.html
本文链接:https://goko.jsntrg.cn/518573968305.html